Why Do Robots Walk Instead of Using Wheels?
Robotics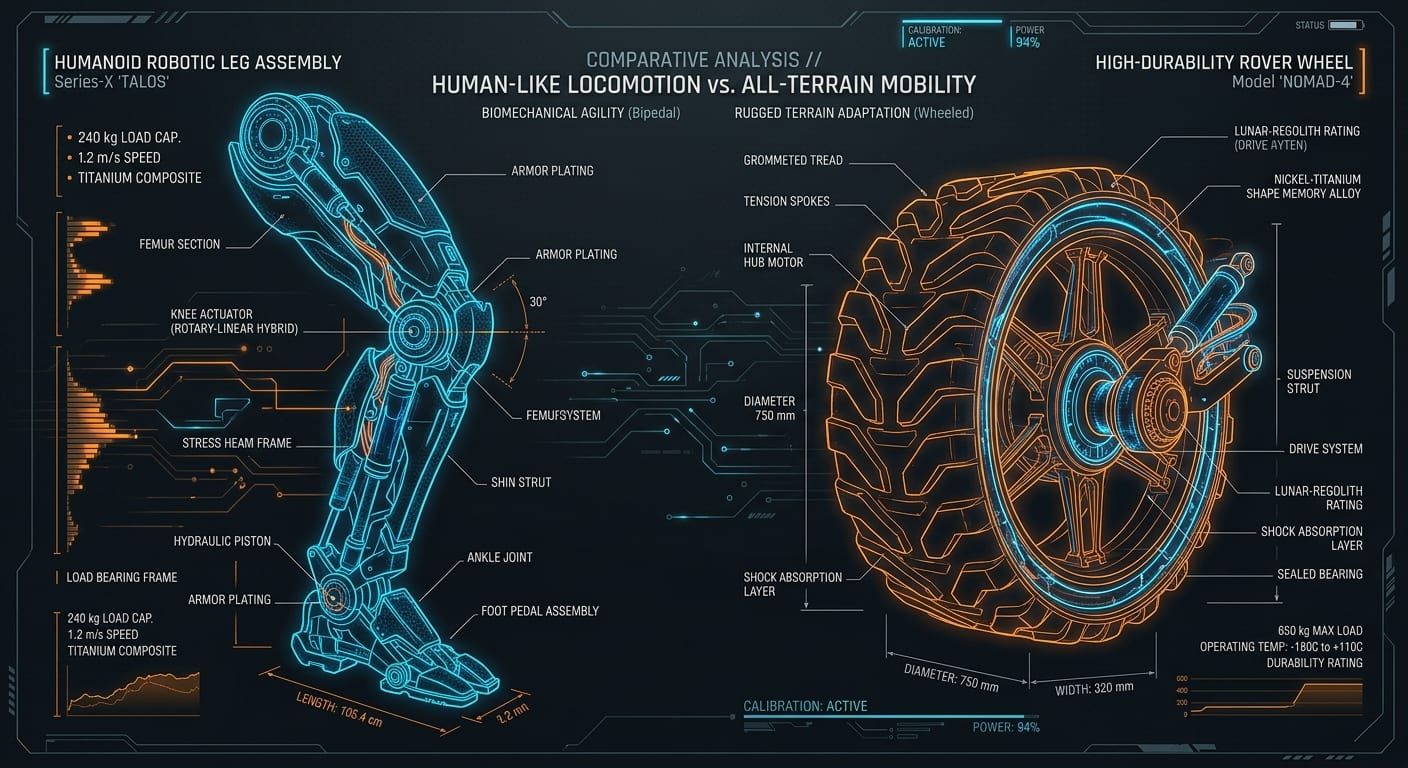
Humanoid robots are stepping up, leaving wheels behind to navigate a world built for humans. Here is why the future of robotics relies on legs—despite the massive engineering challenges.
We live in a world built by humans, for humans. Every step we take, every door we open, and every staircase we climb was designed around our specific biological blueprint: two legs, two arms, and an upright posture.
As tech giants and startups race to deploy commercial robots, a fundamental question emerges: Why are we building complex, expensive bipedal humanoids instead of simply putting them on wheels?
While wheels dominate today's industrial floors, the future belongs to robots that can step, climb, and walk. Here is why legs are winning the race to automate our world.
The Battle of Locomotion: Pros and Cons
To understand why engineers are willing to tackle the immense difficulty of bipedal walking, we have to look at how different designs interact with the world.
Bipedal Humanoid Robots
The Pros:
- Extreme Adaptability: Bipedal robots can navigate almost any terrain a human can, from cluttered construction sites to steep stairwells.
- Compact Footprint: A walking robot takes up very little floor space. It can turn on a dime and squeeze through narrow passages where a wide-wheeled base would get stuck.
- Tool and Workspace Compatibility: Because they stand at human height and move like us, they can use existing human tools, reach high shelves, and operate machines without retrofitting the workspace.
The Cons:
- High Complexity: Keeping a two-legged robot balanced requires incredibly advanced sensors, fast processors, and constant real-time calculations.
- Fragility and Wear: Falls can be catastrophic. The mechanical stress on knees, ankles, and hips leads to faster wear and tear compared to simple wheel axles.
- High Unit Cost: The sheer number of precision motors (actuators) required makes bipedal robots significantly more expensive to build and maintain.
Wheeled Robots
The Pros:
- Unmatched Efficiency: Moving on wheels requires very little energy. Once in motion, momentum does most of the work.
- High Speed: On flat surfaces, wheeled systems can move far faster and safer than any legged robot.
- Simplicity and Reliability: Fewer moving parts mean lower manufacturing costs and far less maintenance.
The Cons:
- Terrain Limitations: A single step, a curb, or a pile of loose debris can completely immobilize a wheeled robot.
- Inability to Climb: Wheeled systems cannot climb standard ladders or steep, uneven stairs without complex, heavy track modifications.
Why the Human Environment Demands Legs
Wheels are perfect for highly optimized, flat environments like Amazon fulfillment centers. In those settings, floors are swept clean, and paths are predictable.
But the real world is chaotic. Think about a typical home or factory:
- Stairs and Steps: The ultimate obstacle for wheels.
- Rubble and Debris: Loose objects on a floor can cause wheels to slip or high-center. Legged robots can simply step over them.
- Ladders: Industrial maintenance often requires climbing vertical or near-vertical ladders—a task impossible for wheels.
By designing robots with legs, companies like Boston Dynamics (with their new electric Atlas), Tesla (with the Optimus Gen 2), and Figure AI (with Figure 01) are ensuring their machines can step into any existing workspace without requiring companies to rebuild their infrastructure.
Earth vs. Space: The Mars Rover Contrast
The choice between wheels and legs becomes even more dramatic when we leave Earth.
To date, planetary exploration has been dominated by wheeled vehicles like NASA’s Curiosity and Perseverance rovers. These machines are marvels of endurance, designed to roll slowly across flat, sandy plains. They prioritize stability and ultra-low energy consumption, allowing them to operate for years on solar or nuclear power.
However, wheels limit where we can explore. Rovers cannot climb the steep, rocky walls of Martian craters, nor can they safely descend into underground lunar lava tubes and caves—places that might hold water ice or signs of ancient life.
The next frontier of space exploration will likely feature legged explorers. NASA and various space agencies are actively testing quadrupedal (four-legged) and bipedal systems. These robots will be able to scale cliffs, scramble over boulder fields, and explore subterranean environments that are completely off-limits to wheeled rovers.
The Energy Tax: Power and Battery Tradeoffs
The biggest hurdle for bipedal robots is power consumption. Walking is incredibly expensive from an energy standpoint.
When a wheeled robot stops moving, it can turn off its drive motors and remain perfectly stable. It consumes almost zero energy while standing still.
In contrast, a bipedal robot is never truly still. It relies on active balance. To stand upright, its computers must constantly process sensor data, and its actuators must make hundreds of tiny micro-adjustments per second. This constant muscle-like tension drains the battery even when the robot is just standing and talking.
Because of this "energy tax," most modern humanoid robots have a limited runtime—usually between two to four hours on a single charge.
To combat this, robotic engineers are focusing on three main areas of optimization:
- High-Torque Actuators: Developing custom electric motors that deliver maximum force with minimal electrical current.
- Passive Dynamics: Designing leg joints that act like springs, storing kinetic energy during a footstep and releasing it on the next step, much like human tendons.
- Lightweight Materials: Using carbon fiber and advanced alloys to shed weight, reducing the workload on the motors.
Ultimately, the choice to build walking robots is a bet on the future. While wheels are easier, cheaper, and highly efficient, they confine robots to a flat, predictable world. By teaching robots to walk, we are giving them the keys to navigate our world exactly as we do.
Subscribe to Apogee Log
Get deep-tech intelligence updates and featured analytical reports delivered to your inbox.